Theo nhà phát triển thì xe có thể tự chạy với tốc độ ổn định ở 25 km/h, tự động cân làn, chủ động rẽ trái/phải theo vạch đường cũng như xác định đối tượng trên đường hoặc đối tượng đang băng qua đường để tự động phanh và tránh vật cản.
Dự án ban đầu thử nghiệm trên một chiếc xe điện cỡ nhỏ thường thấy trong các sân Golf hay resort lớn. Theo chia sẻ thì mẫu thử ban đầu cần đến 350.000 bức ảnh để lập trình cho chiếc xe, họ tự thiết kế các MCU điều khiển vô lăng, chân ga, chân phanh.
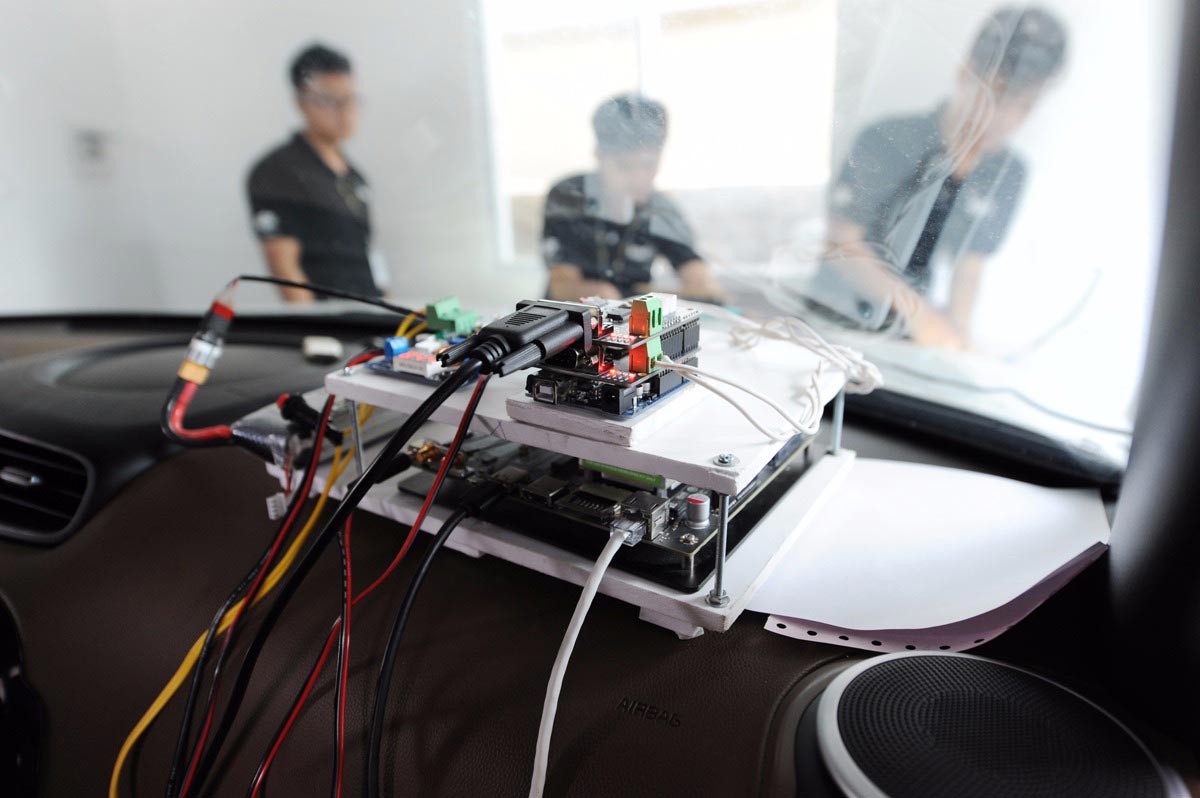
Sau đó, nhóm phát triển đã gắn các thành phần liên quan và chạy phần mềm trên chiếc KIA Soul do nó có nhiều cảm biến ở phía trước và phía sau xe, thuận lợi cho việc phân tích dữ liệu về góc lái, chân phanh, chân ga. Hiện tại, nhóm đã hoàn thành phần steering (đánh lái), trong khi phần brake (phanh) đang trong quá trình thử nghiệm. Phần tự động ga sẽ được đưa vào sau cùng (trên nguyên tắc tương tự hệ thống phanh).

Về cơ bản hệ thống này bao gồm một camera có khả năng phân tích hình ảnh 3D và những chuyển động cùng hệ thống Lidar đo trường sáng để nhận biết tốc độ xe xung quanh. Bên trong xe là bộ kit phát triển ứng dụng của Nvidia chuyên xử lý đồ hoạ được thu thập xung quanh. Hệ phần cứng này tương tự như các hãng lớn Tesla, Google hay Mercedes-Benz đang sử dụng.

Camera ZED của hãng Stereolabs có thể mua được với giá 449 USD.

Hệ thống Lidar lắp ở trên nóc xe, nếu để ý mấy chiếc xe thử nghiệm của Uber cũng có bộ phận này.
Bộ kit phát triển ứng dụng Jetson TX2 của Nvidia
Người lái sẽ trực tiếp lái xe này và thông tin được thu thập trong hệ thống được phân tích. Từ đó khi nhấn nút lái tự động là chiếc xe có thể hoàn toàn di chuyển mà không cần người lái tác động vào vô lăng, chân ga hay chân phanh.
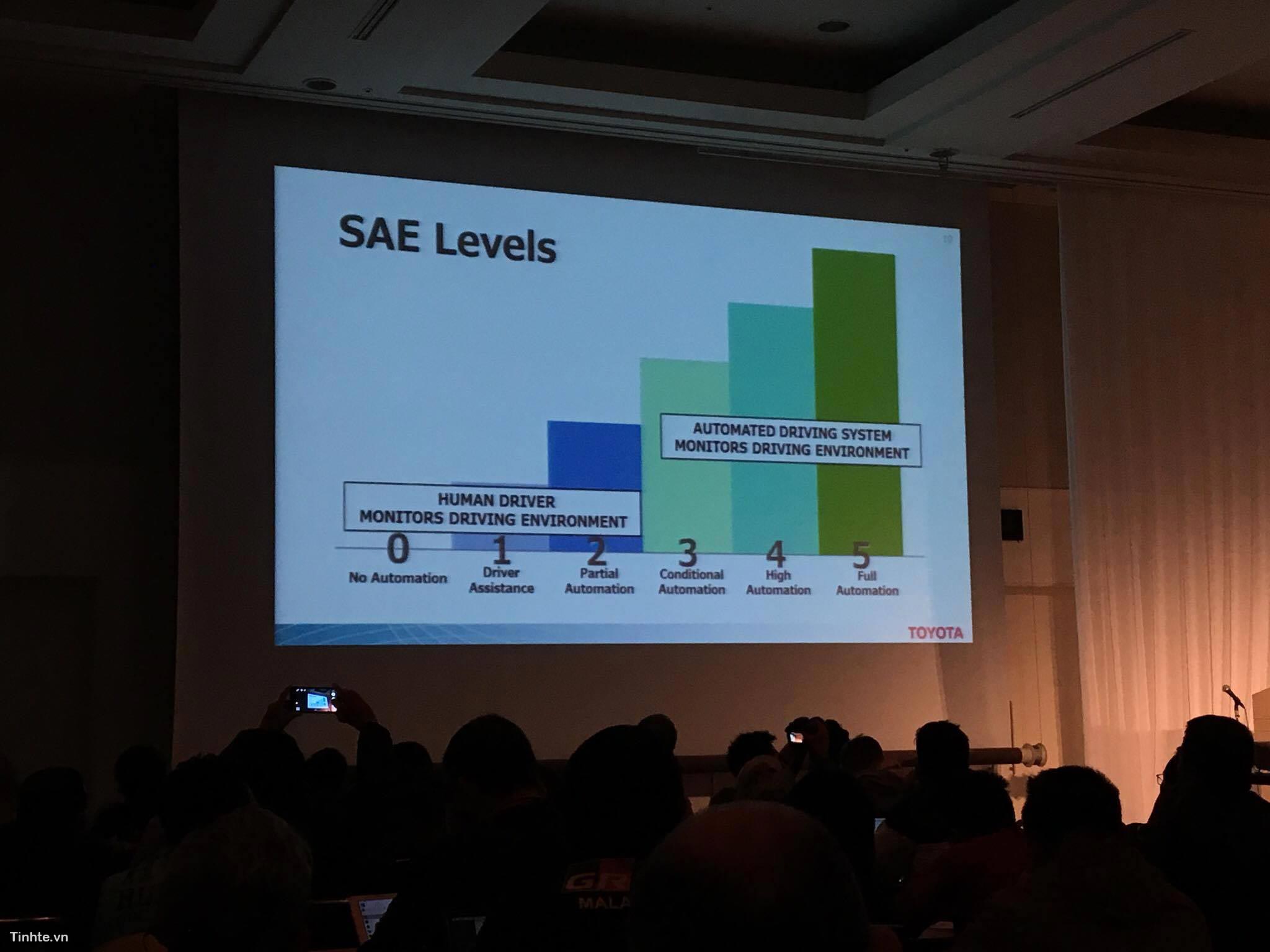
Nếu ứng dụng hệ thống này vào một chiếc xe thương mại thực thụ thì nó hoàn toàn đáp ứng tiêu chuẩn phần cứng tự hành hoàn toàn ở mức 5, ‘level’ cao nhất cho Autonomous car.
Có thể thấy hệ thống do FPT Software phát triển có thể giúp xe di chuyển trong phạm vi nhỏ như nhà xưởng, campus với tốc độ khoảng 20-25 km/h. Tuy vậy nó chưa thể đến mức là di chuyển được trong điều kiện giao thông quá phức tạp như ở Việt Nam. Nó chỉ có thể ứng dụng cho các hệ thống trợ lái trên đường cao tốc khi xe di chuyển nhanh với điều kiện tình huống giao thông ít phức tạp, làn đường rõ ràng, mặc dù, để ứng dụng thực tế trong trường hợp này vẫn cần nhiều thời gian để thử nghiệm. Sắp tới, nhóm phát triển sẽ tập trung cải thiện năng lực công nghệ như tăng độ chính xác nhận dạng đối tượng, tăng tốc độ xử lý khi xe chạy ở tốc độ cao.
Như vậy bước đầu FPT Software có thể minh chứng được việc công ty phần mềm tại Việt Nam có thể phát triển được ứng dụng điều khiển xe tự lái dựa trên những thành phần có sẵn. Chắc chắn tương lai FPT sẽ không phát triển một chiếc xe hơi mà họ sẽ ứng dụng những giải pháp nghiên cứu được vào trong thực tế và cung cấp cho các đối tác có nhu cầu sử dụng.
Video vận hành thử nghiệm của xe